I’ve already written a few guides on building whoops (here, here, here, and here) but it is now easier than ever for beginners to build brushless whoops. In some cases, soldering and Betaflight configuration is no longer necessary. Just build, bind, and fly!.
Parts and Equipment
For this build, I used the following:
- Crazybee F4 Lite FlySky AIO FC ESC RX VTX
Turbowing Cyclops 2 Camera (out of stock)Runcam Nano 3 camera- Eachine 0802 19000KV motors
- URUAV UR65 65mm frame
Armor 65 or Tiny 6/6X CanopyMobula6 canopy or UZ65 canopy- Armor 65 or Tiny 6/6X Propellers
- 0.8mm and 1mm drill bits
- Precision Philips Screwdriver
Build Procedure
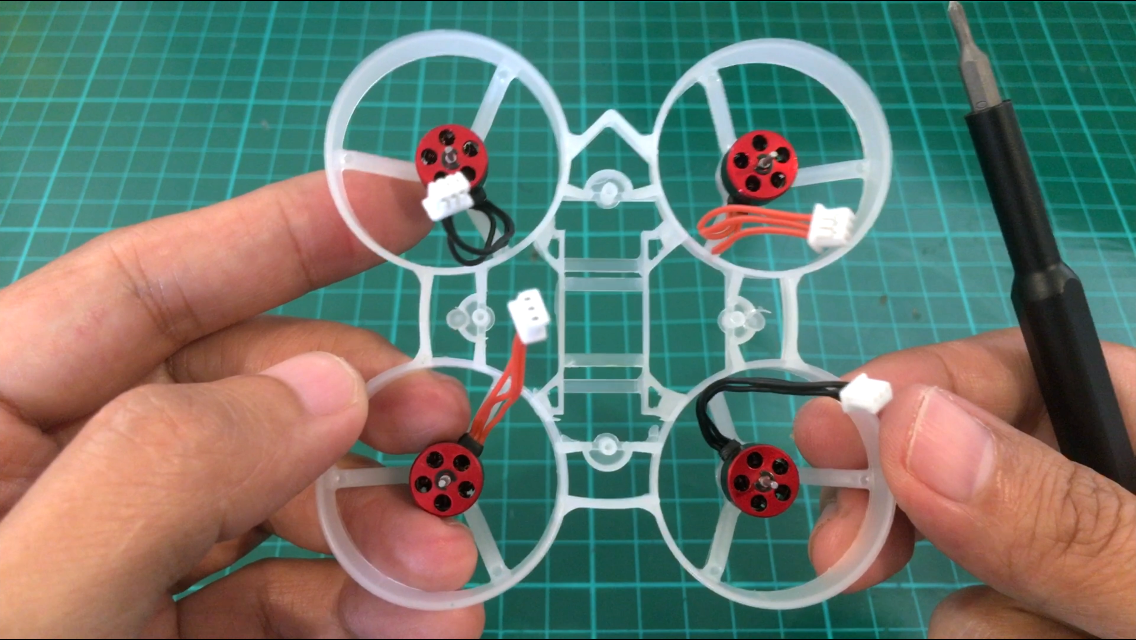
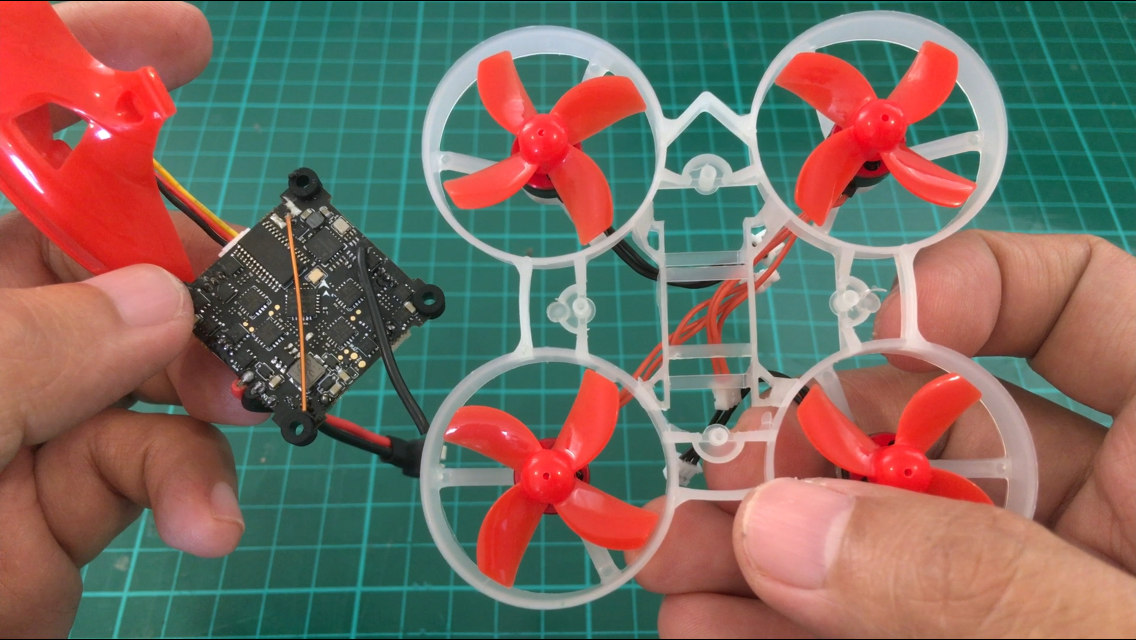
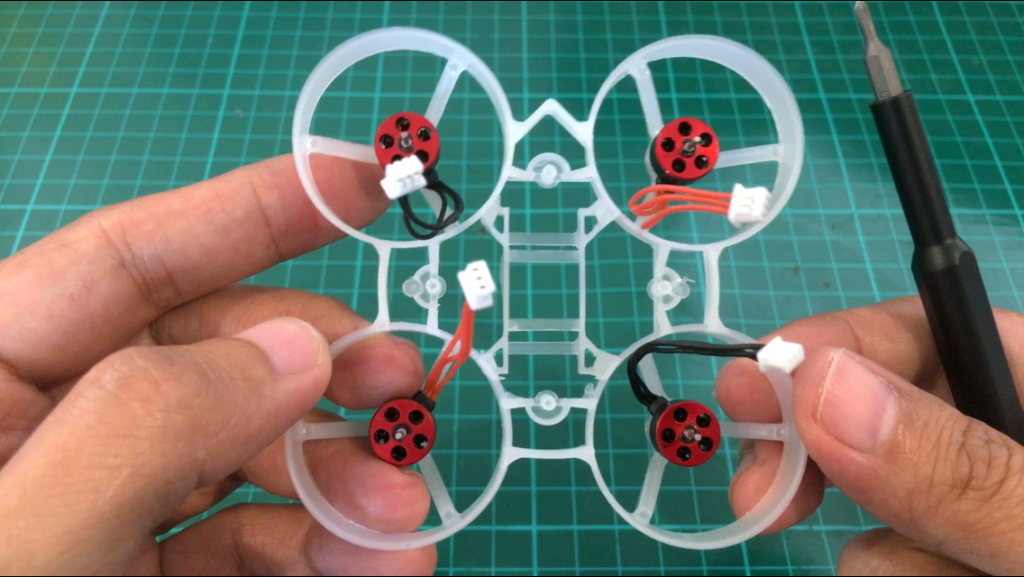
- Install the motors to the frame.We’re going props out so we’ll put the black wired motors on the front left.
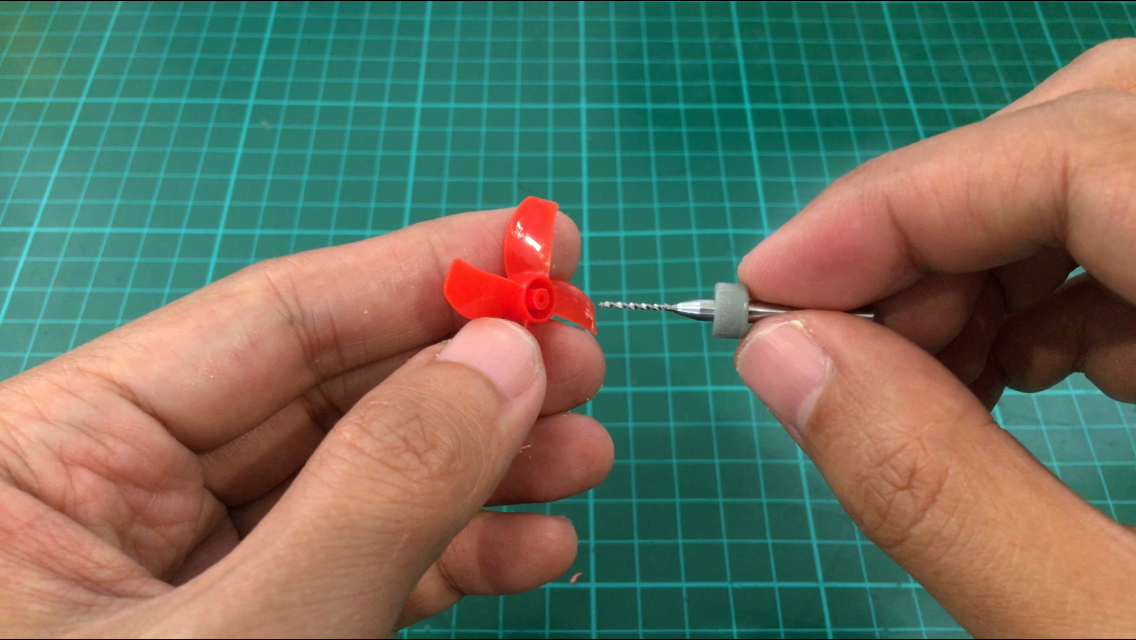
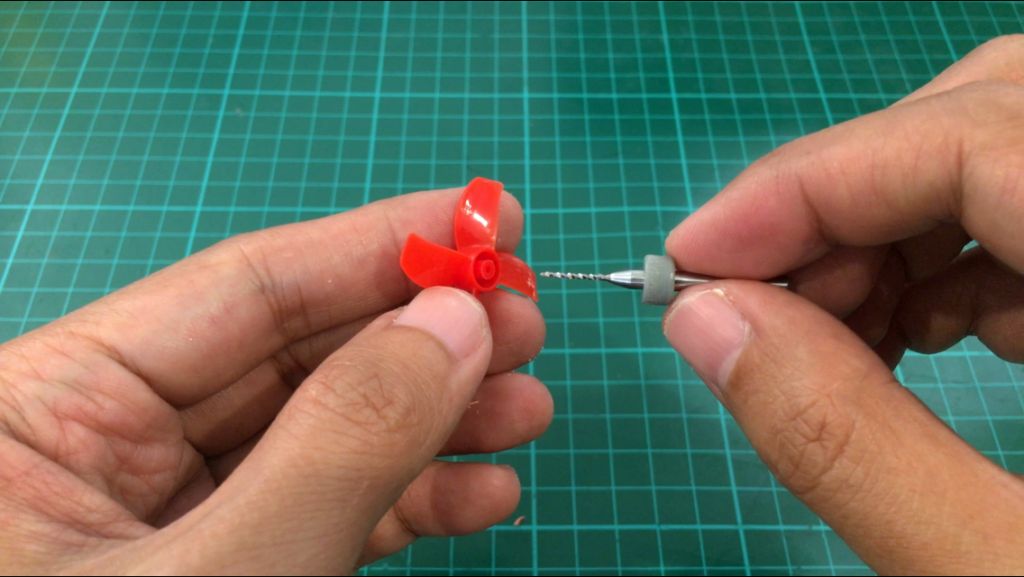
- Drill through the props so they will sit flush on the motor bells.
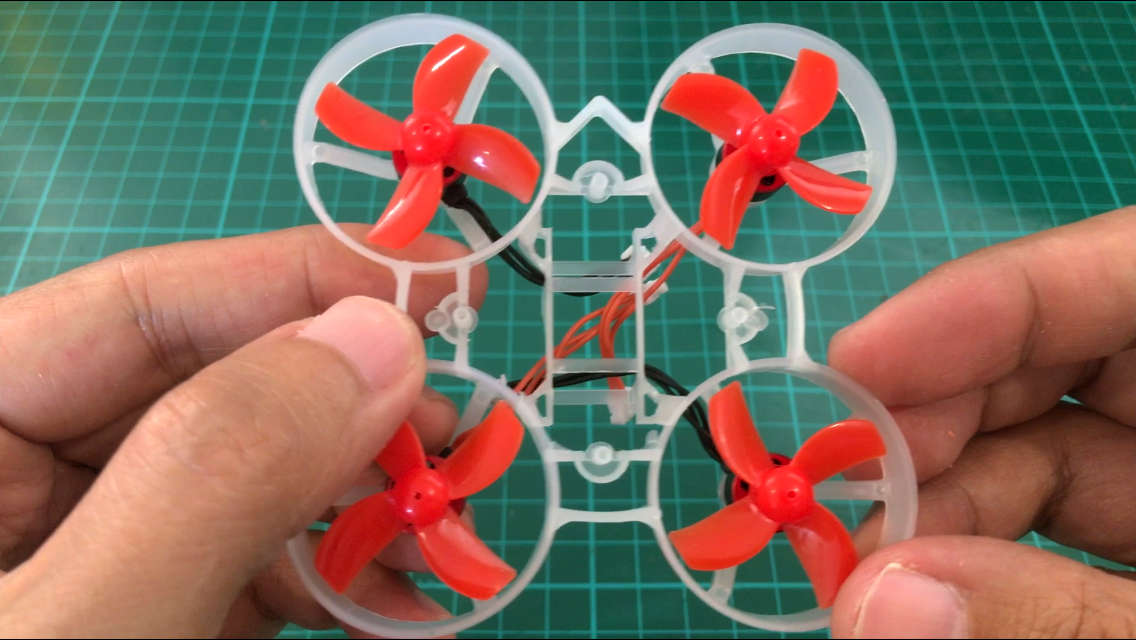
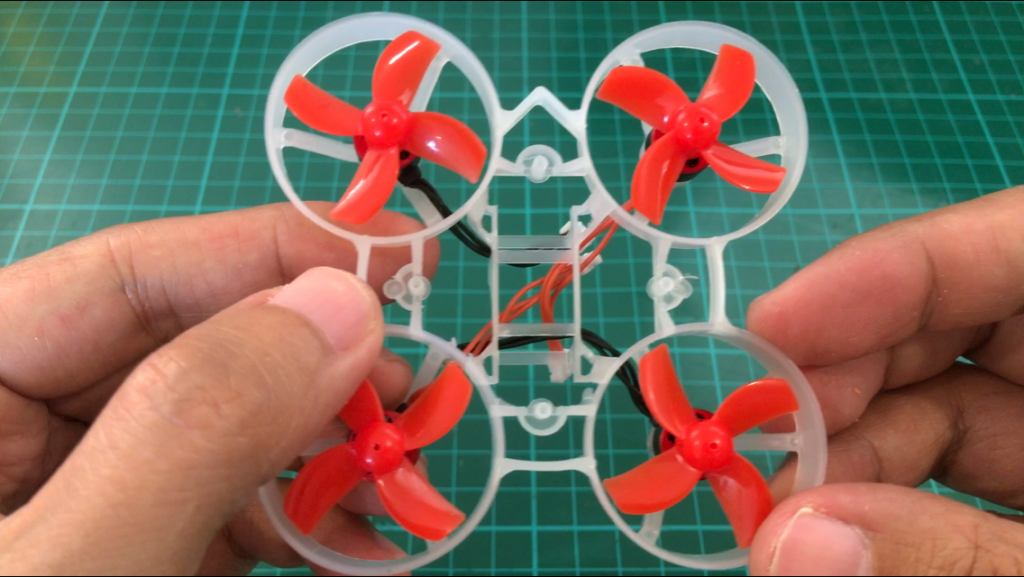
- Install the props on the motors.
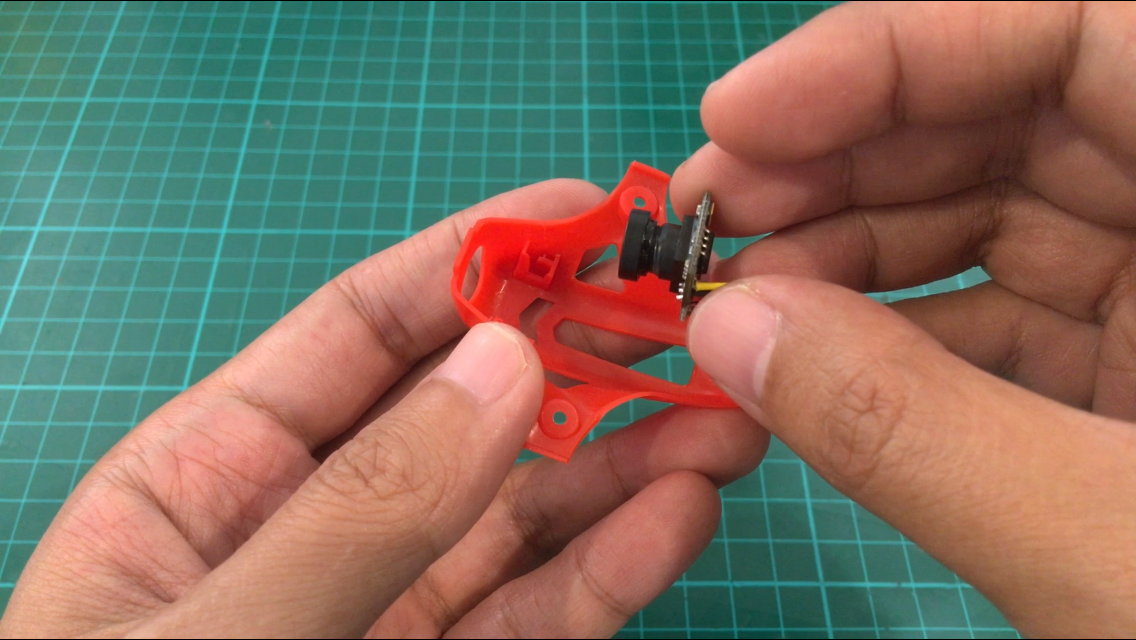
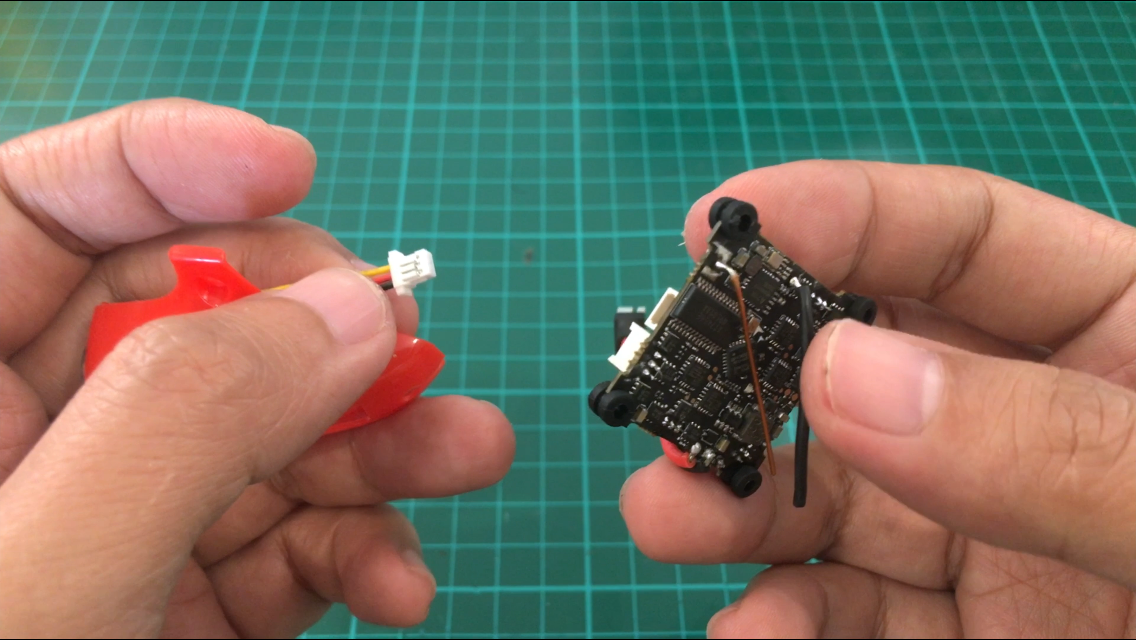
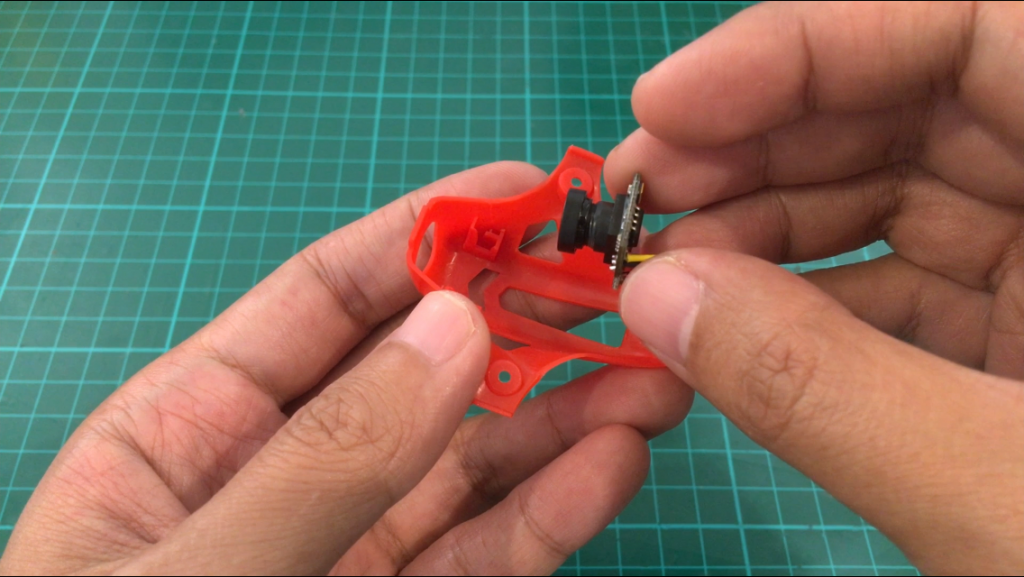
- Mount the camera in the canopy.
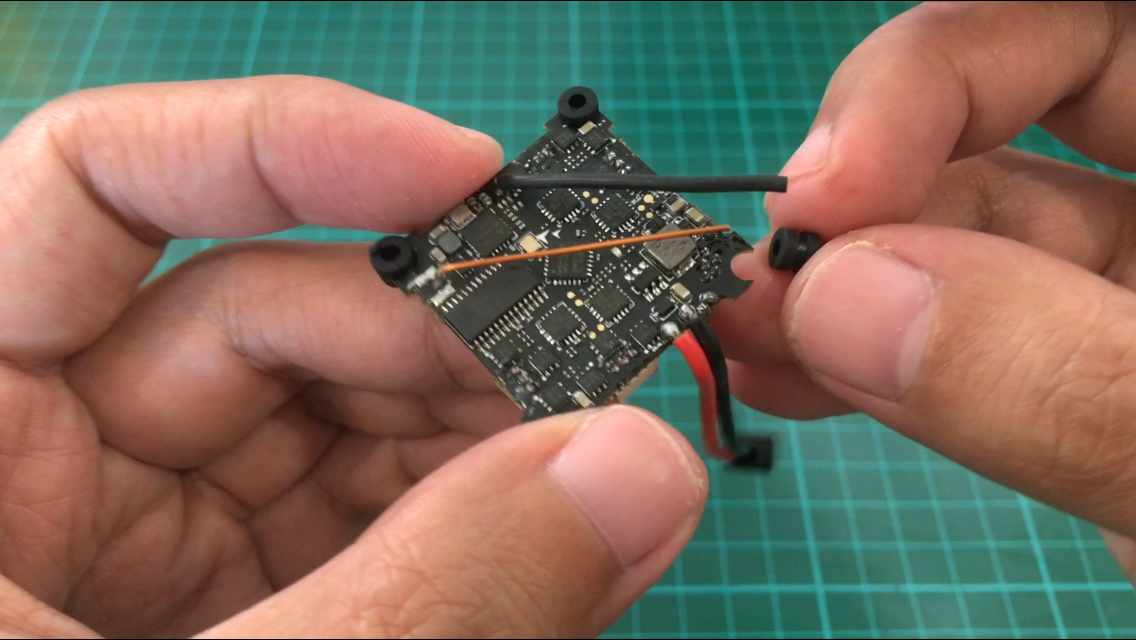
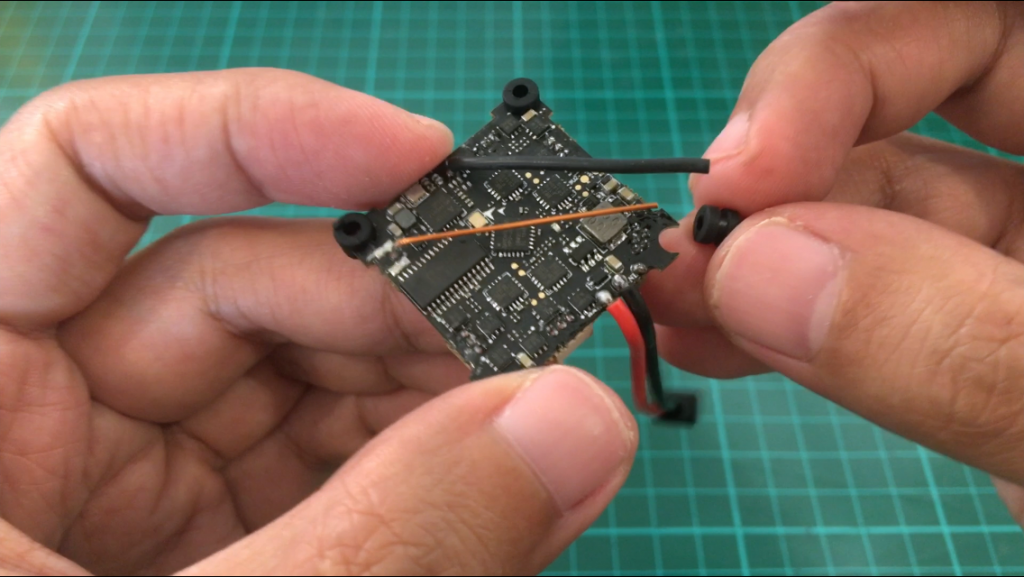
- Install the gummies (rubber dampers) on the flight controller.
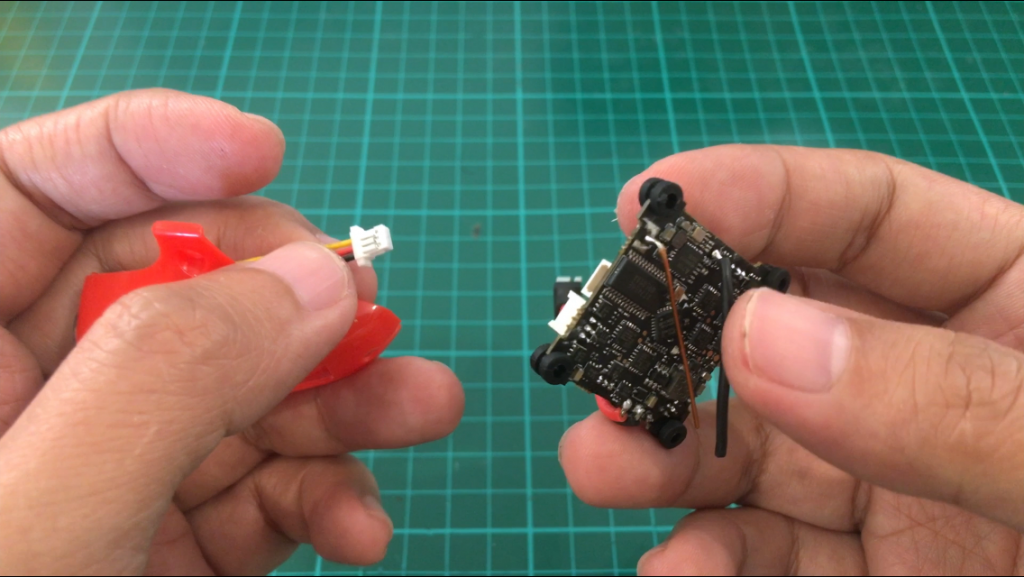
- Plug in the camera to the flight controller.
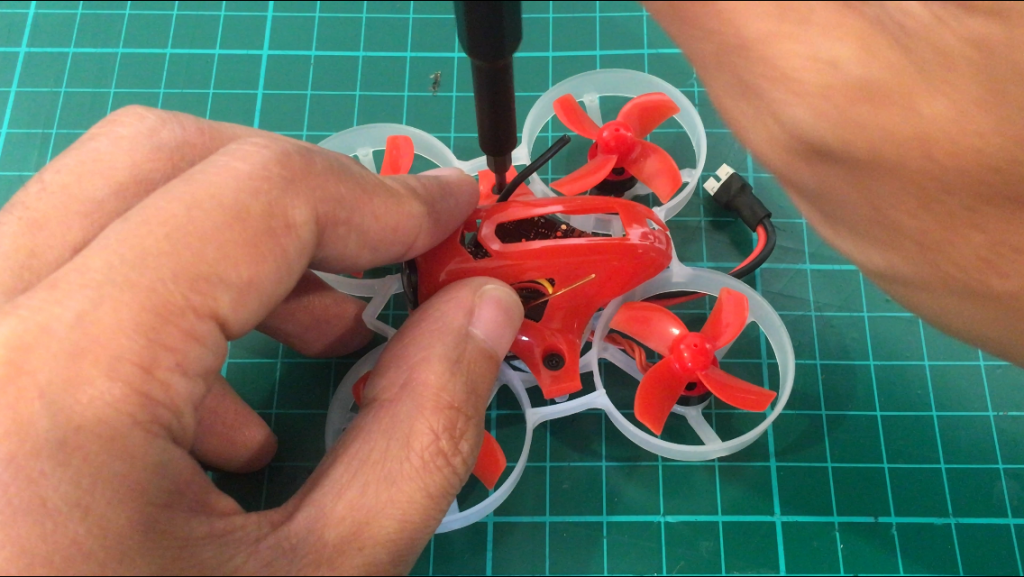
- Mount the flight controller to the frame.
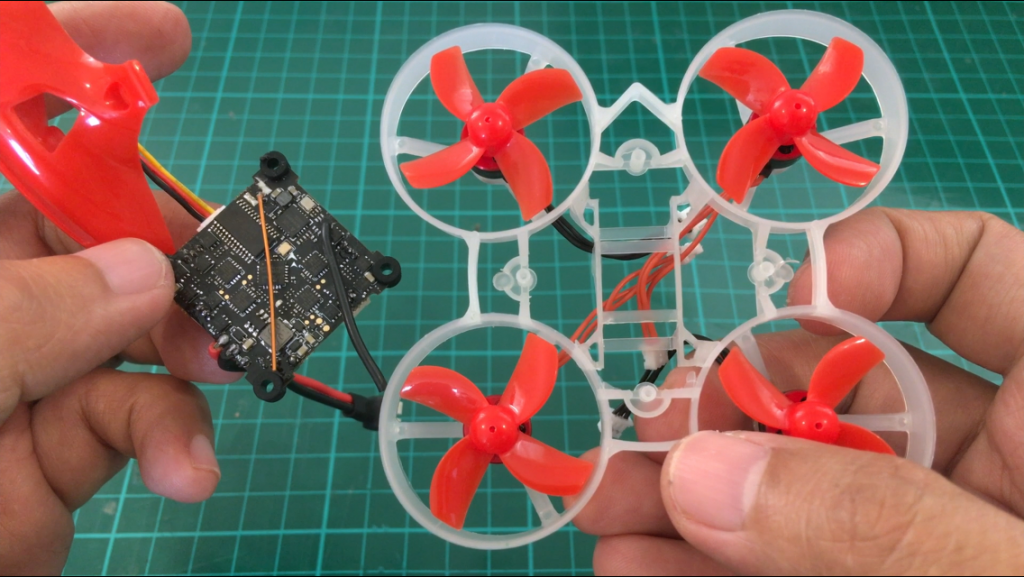
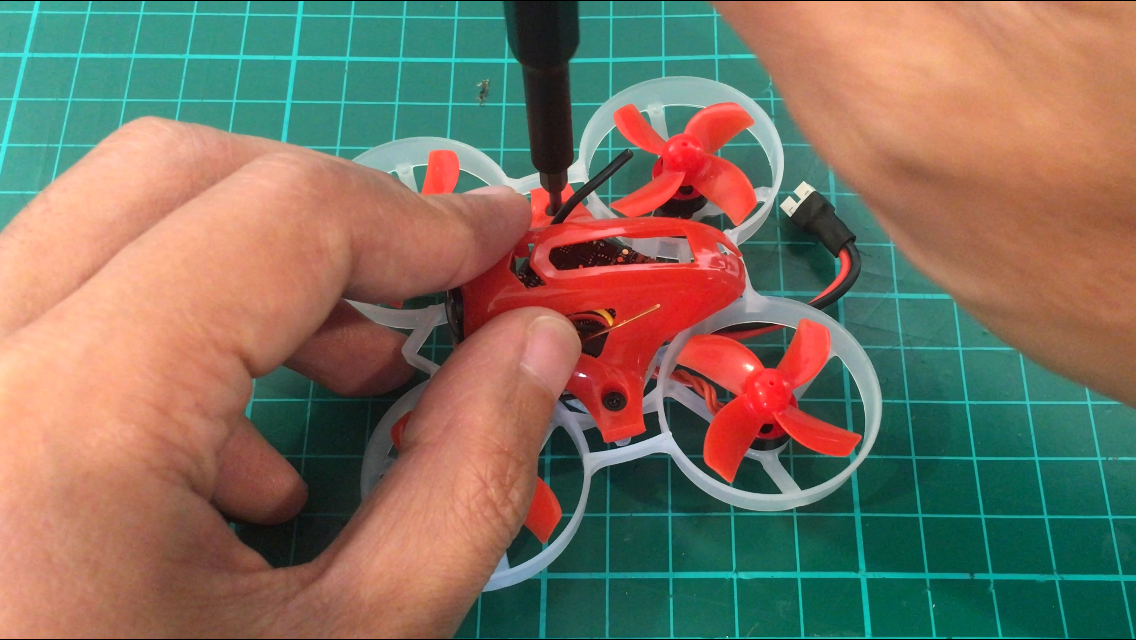
- Position the antennas out of the canopy

- Screw in the flight controller and the canopy
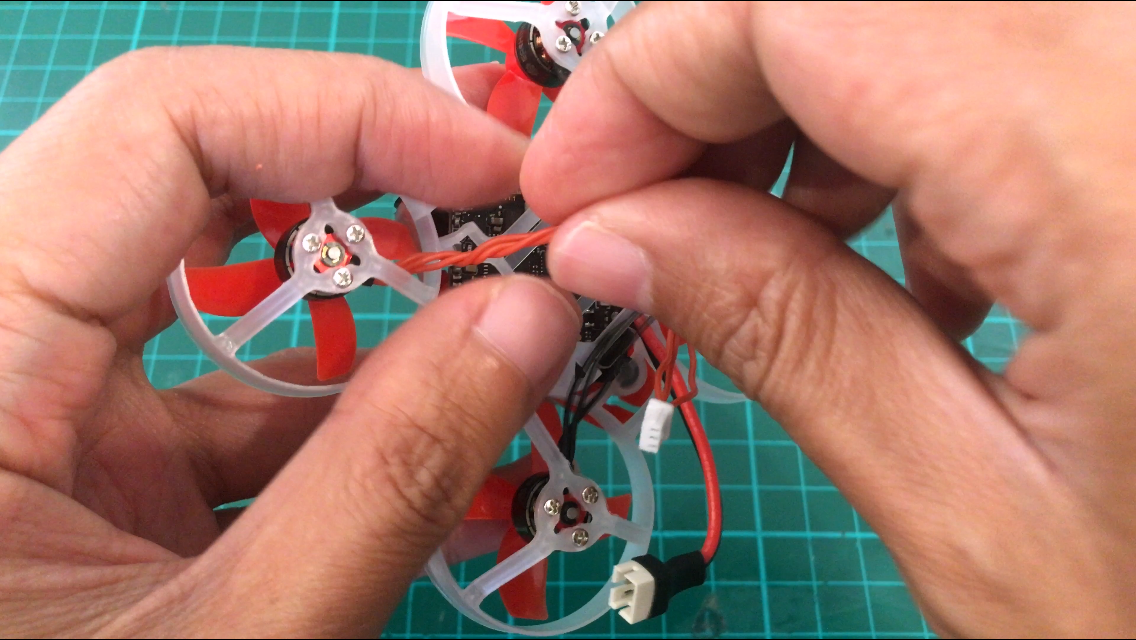
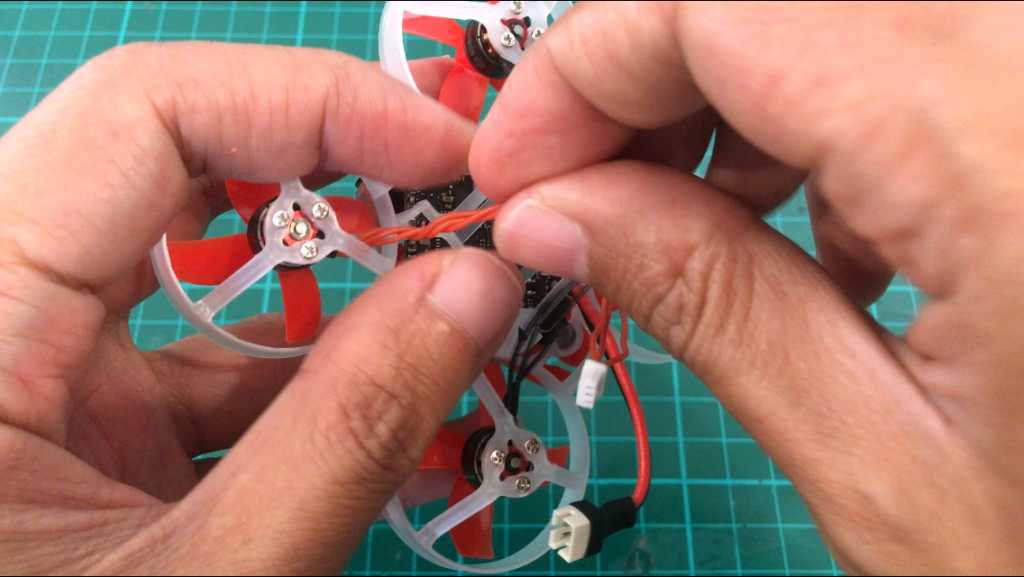
- Twist and plug in the motor wires.
- Check continuity between battery connector pigtail with a multitester. There should be NO continuity
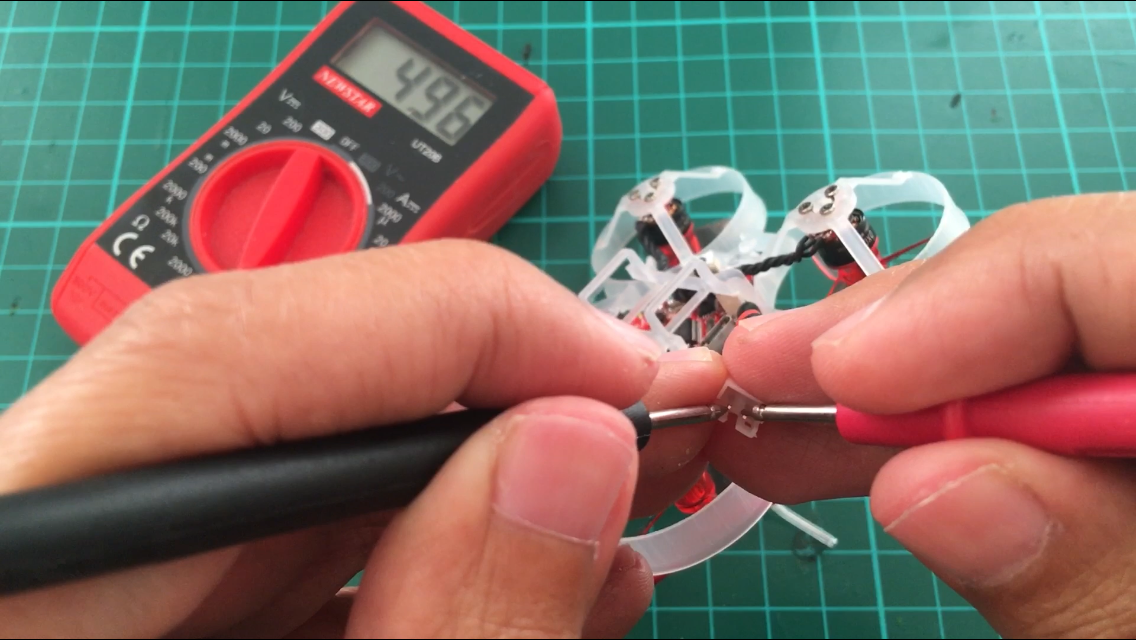
- Done!